Il controllo di precisione della corrente nei motori passo-passo è fondamentale per ottenere prestazioni ottimali, specialmente in applicazioni che richiedono un posizionamento accurato e un elevato sviluppo di coppia. Tra le diverse metodologie di pilotaggio, il chopper bipolare si distingue come una soluzione ampiamente adottata per la sua efficacia nel gestire la corrente nelle bobine del motore. Questa tecnica, che sfrutta la modulazione di larghezza d'impulso (PWM - Pulse Width Modulation), permette di ottenere un controllo dinamico della corrente erogata, superando alcune delle limitazioni intrinseche dei metodi di pilotaggio più semplici.
Il Funzionamento Base del Chopper Bipolare
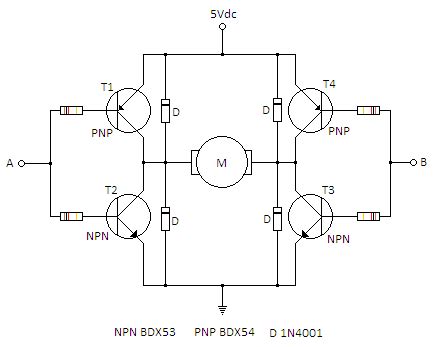
Per comprendere appieno il funzionamento di un drive chopper bipolare, è utile partire da uno schema circuitale semplificato. Immaginiamo di utilizzare un motore con caratteristiche tipiche: una resistenza di bobina di 1 ohm, un'induttanza di 1 millihenry e una corrente nominale di 1 ampère. Questo motore viene integrato nel circuito in una configurazione specifica. Assumiamo che i transistor di commutazione siano ideali, senza cadute di tensione significative quando attivati, e che l'alimentazione (+V) sia impostata a 1.0 volt.
Nel contesto di un drive bipolare, la corrente può fluire attraverso la bobina del motore in entrambe le direzioni, consentendo al motore di ruotare in senso orario o antiorario. Questo si ottiene attraverso una configurazione nota come "ponte a H". Il ponte a H è costituito da quattro interruttori (tipicamente transistor) disposti a formare una "H", con la bobina del motore posizionata nel braccio orizzontale.
Consideriamo il caso in cui la logica di controllo attivi i transistor Q1 e Q3. La corrente fluisce dall'alimentazione positiva (+V), attraversa Q1, entra nell'estremità non "puntata" (secondo la convenzione del trasformatore) della bobina del motore "A". Successivamente, esce dall'estremità "puntata" della bobina, passa attraverso Q3 e un resistore di rilevamento corrente (Rsense) per raggiungere la massa (comune dell'alimentazione). In questo scenario, con +V = 1.0 volt e una resistenza di bobina di 1 ohm, la corrente nella bobina è limitata a 1 ampère, un valore in linea con le specifiche del motore.
Ora, invertiamo il flusso di corrente. Spegnendo Q1 e Q3 e accendendo Q2 e Q4, la corrente inizia a fluire attraverso Q2, entra nell'estremità "puntata" della bobina, esce dall'estremità non "puntata", attraversa Q4 e Rsense, per poi tornare al comune dell'alimentazione. Il risultato è che la corrente viene invertita nella bobina del motore, senza la necessità di un'alimentazione negativa. Questa capacità di invertire la corrente è una caratteristica distintiva del pilotaggio bipolare e permette di sfruttare appieno l'avvolgimento del motore, a differenza del pilotaggio unipolare che ne utilizza solo una parte.
La Modulazione di Larghezza d'Impulso (PWM)
Il vero "cuore" del drive chopper bipolare risiede nella tecnica di modulazione di larghezza d'impulso (PWM). A differenza del pilotaggio unipolare, dove un resistore serie può essere utilizzato per limitare la corrente, nel drive bipolare la corrente è gestita da un comparatore che monitora costantemente il flusso attraverso il resistore Rsense. Questo valore viene confrontato con il livello di corrente desiderato, impostato dal "controllo livello corrente/convertitore digitale-analogico" (DAC).
Supponiamo di aumentare la tensione di alimentazione (+V) a 2.0 volt. Senza un resistore serie limitatore, la corrente tenderebbe ad aumentare rapidamente. Tuttavia, il circuito PWM interviene in modo decisivo. Se la tensione di alimentazione passa da zero a 2.0 volt al tempo t=0, la corrente nella bobina aumenterà da zero fino a raggiungere il valore impostato di 1 ampère in un tempo leggermente inferiore a una costante di tempo (L/R = 1 mH / 1 ohm = 1 msec). È importante ricordare che in un circuito RL, la corrente raggiunge il 63% del suo valore massimo in un tempo pari alla costante di tempo. Quindi, con una tensione di 2.0 volt e una resistenza di 1 ohm, il 63% del valore massimo teorico (2 ampère) sarebbe 1.26 ampère.
È proprio a questo punto che entra in gioco il circuito PWM. Non appena la corrente raggiunge il valore di 1 ampère (il livello comandato), il comparatore e la logica di controllo disattivano i transistor attivi. Questo porta la corrente a diminuire gradualmente a causa dell'induttanza della bobina, diciamo fino a 0.99 ampère. Non appena la corrente scende al di sotto della soglia impostata, il comparatore e la logica di controllo riattivano i transistor, facendo risalire nuovamente la corrente. Questo ciclo continuo di accensione e spegnimento dei transistor, che avviene a frequenze elevate, è definito "chopping" (o "tranciatura") della corrente di fase. Da qui deriva il nome "bipolar chopper drive".
La frequenza di questo chopping è tipicamente molto alta, spesso nell'ordine dei 20 kHz o superiore, ben al di sopra della gamma udibile dall'orecchio umano. Questo assicura che il motore riceva impulsi di corrente che, mediati nel tempo, mantengono il valore desiderato, ma con una transizione rapida che evita il surriscaldamento e permette un controllo preciso.
Segnale PWM: che cos'è, come funziona e a che cosa serve
Vantaggi del Chopper Bipolare
L'utilizzo del chopper bipolare offre vantaggi significativi rispetto ad altre metodologie di pilotaggio per motori passo-passo:
Maggiore Coppia e Efficienza: Sfruttando appieno entrambi gli avvolgimenti del motore e invertendo la corrente, il pilotaggio bipolare è in grado di generare una coppia significativamente maggiore - fino al 40% in più - rispetto al pilotaggio unipolare a parità di condizioni. Questa maggiore efficienza si traduce in un miglior utilizzo dell'energia e in una minore dissipazione di calore.
Controllo Preciso della Corrente: La tecnica PWM consente un controllo estremamente preciso della corrente erogata alla bobina. Questo è cruciale per mantenere la coppia desiderata indipendentemente dalle variazioni della tensione di alimentazione o dalla velocità del motore. Il comparatore assicura che la corrente non superi mai il limite impostato, proteggendo il motore e garantendo prestazioni costanti.
Elevata Coppia ad Alte Velocità: Una delle sfide nel pilotaggio di motori passo-passo è mantenere una coppia elevata anche a velocità di rotazione elevate. La costante di tempo (L/R) delle bobine limita la rapidità con cui la corrente può salire durante gli impulsi. Il chopper bipolare aggira questo problema applicando tensioni molto più alte (spesso 8 volte la tensione nominale) per brevi periodi. Questo fa sì che la corrente salga rapidamente, anche a fronte di un'elevata impedenza induttiva alle alte velocità. La larghezza degli impulsi viene adattata dinamicamente: a velocità più elevate, l'impedenza delle bobine aumenta, richiedendo impulsi più lunghi per raggiungere la corrente desiderata; a velocità più basse, gli impulsi sono più corti.
Ridotta Dissipazione di Potenza: Rispetto ai metodi analogici di regolazione della tensione o corrente, che implicano l'uso di resistori o altri componenti dissipativi, la commutazione rapida ON/OFF della tecnica PWM riduce drasticamente la potenza dissipata nei transistor di switching. Questo aumenta l'efficienza complessiva del sistema.
Applicazioni del Chopper Bipolare
La precisione e l'efficienza del chopper bipolare lo rendono ideale per una vasta gamma di applicazioni, tra cui:
Stampanti 3D e Macchine CNC: Queste macchine richiedono un posizionamento estremamente preciso degli assi, dove il controllo accurato della coppia del motore passo-passo è essenziale per la qualità della lavorazione.
Robotica: Bracci robotici e altri sistemi automatizzati beneficiano della capacità del chopper bipolare di fornire coppia controllata per movimenti fluidi e precisi.
Apparecchiature Medicali: Dispositivi come pompe per infusione, scanner e sistemi di dosaggio richiedono un movimento motorizzato altamente affidabile e preciso.
Automazione Industriale: In generale, qualsiasi sistema che necessiti di un controllo di posizione e velocità accurato può avvalersi dei vantaggi del pilotaggio chopper bipolare.
Considerazioni sul Pilotaggio a Quattro Quadranti
Mentre il chopper bipolare standard opera principalmente in due quadranti (fornendo coppia in una direzione e frenando passivamente), esistono estensioni del concetto per il pilotaggio a quattro quadranti. In questo regime, il motore non solo può ruotare in entrambe le direzioni, ma può anche agire come generatore (frenata rigenerativa). Quando il motore frena attivamente, esso genera energia che deve essere dissipata o reimmessa nel sistema. Nei chopper tradizionali, un secondo chopper viene utilizzato per inserire un resistore di dissipazione adeguato. Soluzioni più avanzate permettono di rigenerare questa energia in rete, sebbene questa implementazione sia generalmente più costosa e complessa. La scelta tra queste configurazioni dipende dai requisiti specifici dell'applicazione in termini di prestazioni, efficienza energetica e costo.
La capacità di controllare finemente la corrente in ogni bobina, indipendentemente dalla tensione di alimentazione e dalla velocità del motore, rende il chopper bipolare PWM una tecnologia fondamentale per ottenere il massimo dalle prestazioni dei motori passo-passo in un'ampia varietà di settori.
tags: #pwm #chopper #type #bipolar #stepp #che